はじめに
前回は概要を解説しました。まだ読んでない方は是非読んでみてください。
今回は1日目の「必要な技術編」です。
実際にどのようなプログラミング技術を身に着ける必要があるのかを解説します。
- 0日目 必要な機器
- 1日目 必要な技術の解説 ← 本記事
- 2日目 環境構築(学習用PC,SiOt,ラズパイ)
- 3日目 SiOtの使い方
- 4日目 ラズパイ・pythonの基礎
- 5日目 ラズパイとSiOtの接続+撮像プログラム作成
- 6日目 学習・モデル変換
- 7日目 ラズパイへの組み込みと判定プログラム作成
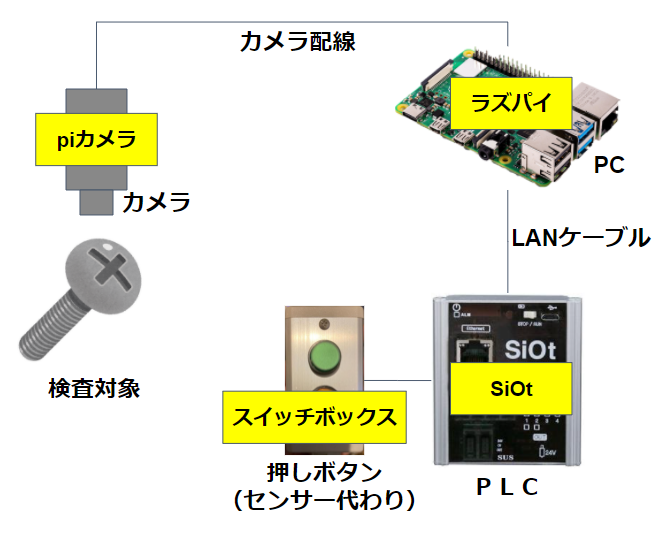
今回製作する装置(再掲)
今回作る装置は以下のようになります。
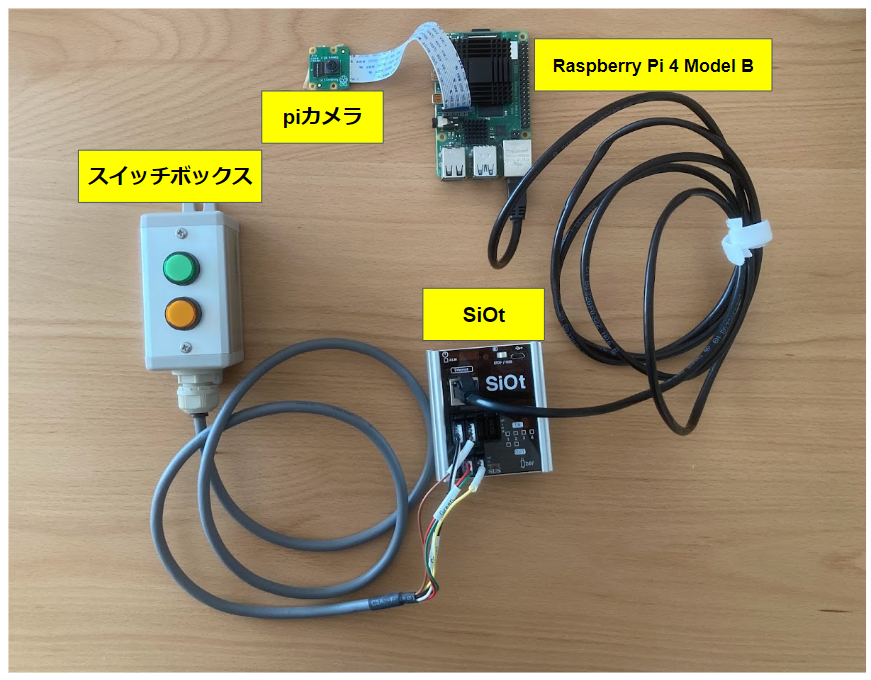
実際の装置の写真は以下のようになります。
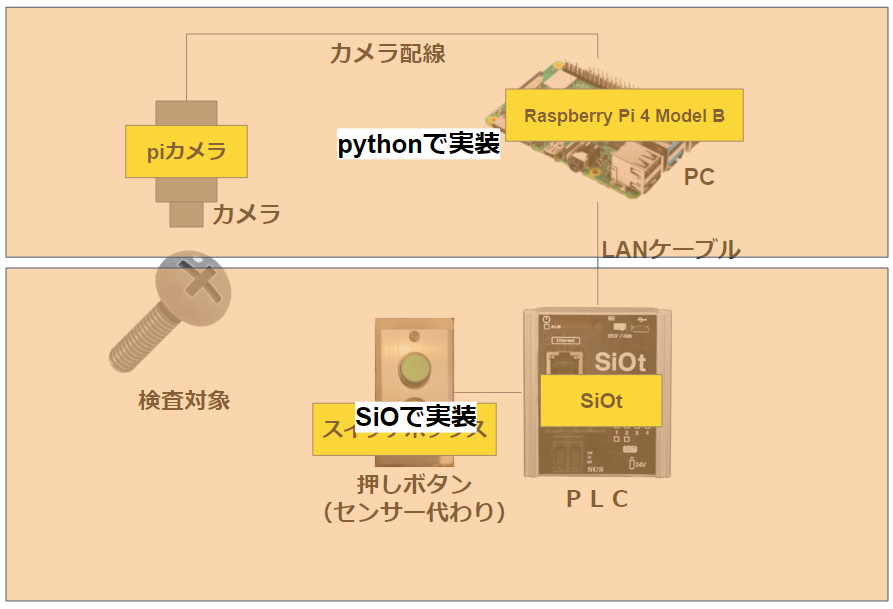
必要な技術
上記の図を元に必要な技術を示していきたいと思います。
大きく2つの技術を身に着ける必要があります。
- python=PC側の実装
- SiO=PLC側の実装
pythonでの実装
pythonでの実装をもう少し細かく身に着ける技術を示したものが以下の図となります。
以下の通り、大きく4つの技術を身に着ける必要があります。
- カメラ制御技術
- 画像処理技術
- ディープラーニング技術
- PLCとの通信技術
それぞれの技術一つ一つを一から自分で実装するとなるととても大変で初心者では不可能ですが、
pythonというプログラミング言語では「ライブラリ」という既に有識者によって作られた「機能が詰まった道具箱」を利用することができます。
各技術の下に書いてある「opencv」等はライブラリの名前となっています。
この道具箱から好きな機能を取り出して組み合わせることで好きなプログラムを実装することができます。
例えば、カメラの制御を代表例に挙げますと
import cv2
capture = cv2.VideoCapture(0)
ret, frame = capture.read()この三行で実装することができるようになっています。
他の技術に関しても同様に簡単に実装できるようになっており、使い方さえ覚えてしまえば誰でも実装可能になっています。
(これがタダで利用できるのですから利用しない手はないですよね)
今はここに挙げられているライブラリの名前を覚えておいていただければ大丈夫です。
今後の記事で使い方を1つ1つ紹介していきます。

SiOでの実装
これに関しては特に特別な知識がなくても大丈夫です。
非常に簡単に作れるようにソフトも準備されていますので、触っていれば勝手に慣れます。
今回の画像検査装置を作る過程で覚えていっていただければと思っています。
さらに搬送ローラーを使って自動搬送装置を作ろうと思うと今回の例より複雑なプログラムを組む必要が出てきますが、基本が出来ていればそんなに苦労せずできると思います。
最後に
この記事で今回作る画像検査のために必要な技術の全体像がぼんやり掴めたと思います。
今後、今回登場したライブラリの名前が出てきますので頭の片隅に止めておいてください。
次回は各機器を使えるようにするために環境構築をしていきます。
コメント